The mission of the Autonomous Driving Working Group is to develop autonomous driving (AD) and Advanced Driver Assistance Systems (ADAS) requirements and specifications for the MIH Open EV Platform platforms. The scope of the AD WG is to leverage AWF (the Autoware Foundation) Open AD Kit specifications and reference implementations to define AD implementation agnostically. At MIH Partner Gathering Event, this working group demonstrated: The Sensor API architecture was developed by the AD/ADASworking group through a number of sensor manufacturers, including oToBrite’s camera sensor, Kneron's Edge AI sensor computing module, and Foxconn lidar sensor, these modules will be connected to the ADAS central computing unit to present the AD/ADASworking group Sensor API usage scenario.
Powertrain
This working group focus on 4 main subjects:
two-speed gearbox
e-beam axle
disconnecting device
SiC powertrain
At MIH Partner Gathering Event, this working group demonstrated: A two-speed gearbox from Great Taiwan Gear, we will use a two-speed gearbox as a reference design baseline and work on this working group’s deliverable.Another demo is for the SiC powertrain semiconductor partnered with Sentec Group.
EEA
This working group is focusing on designing, developing, and defining EEA and related component functions, involving redundancies, efficiencies, and performance to support the need for future EVs. We plan to create a software stack reference for future EEA design with an implementation plan as below:
2022: Hardware and Software integration on EE Buck
2023: Hardware and Software integration on the prototype car
2023: Certify Software Stack
2024: Certify All Developed Features of EEA At MIH Partner Gathering Event, this working group demonstrated:
Datastream system across different zone over ethernet
Unify application and system framework on the zonal controller and zonal gateway
Security & OTA
The mission of the Security and OTA Working Group is to create a zero-trust ecosystem for vehicle lifecycle management to solve connected vehicle challenges and satisfy UNECE R155 and R156 compliance. The primary design will focus on components, security compliance verification, over-the-air for security, and over-the-air interface and APIs on Open EV Platform. It applies to connected applications like V2X, smart access for the telemetric unit as the primary reference design in 2022. At MIH Partner Gathering Event, this working group demonstrated:
T-BOX security verification and OTA on the car
Standard EV Security Matrix for Threat Detection
Concept manual for Security and OTA on Open EV Platform
Cloud Service & Development platform and tools
Cloud service providers offer cloud storage services, cloud-native application development platforms, cloud ML Ops platforms, application simulation/verification platforms,etc. Application development partners can use these platforms to get useful data, develop and validate applications. The application developers can also use this platform to provide online cloud services for vehicle owners, such as instant maps service, fleet management service and vehicle security center, etc.At MIH Partner Gathering Event, this working group demonstrated:
Cloud data visualization
data sharing
AI Model training pipeline
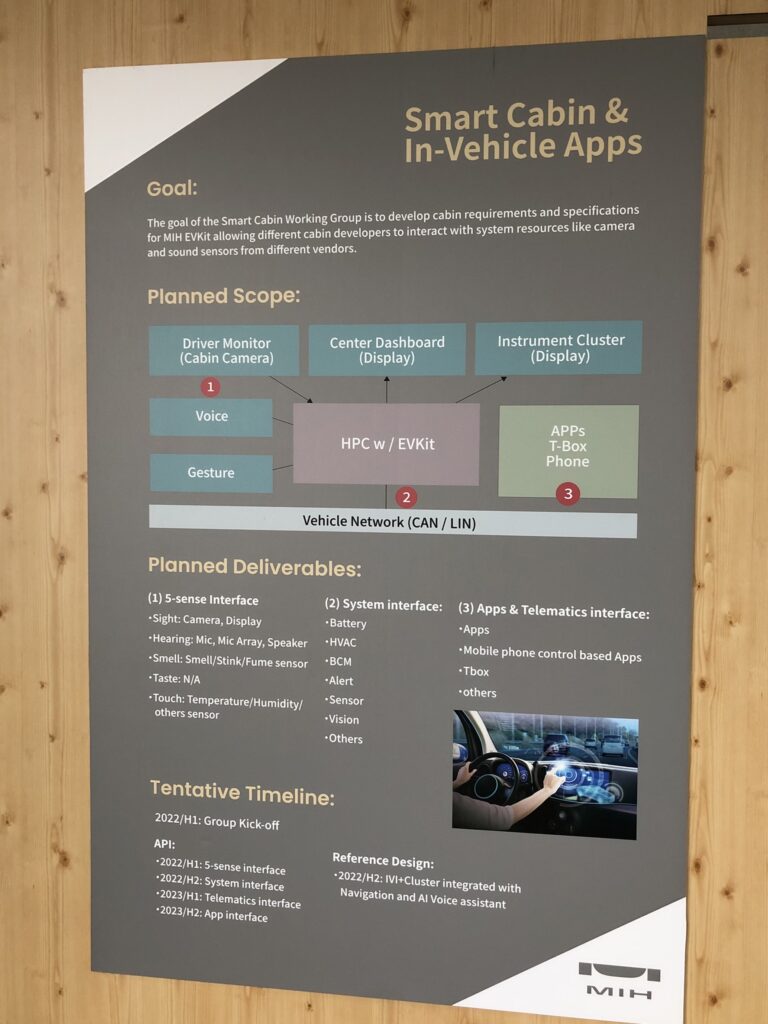
Smart Cabin & In-Vehicle Apps
The goal of the Smart Cabin & In-Vehicle AppsWorking Group is to develop cabin requirements and specifications for MIH Open EV Platform allowing different cabin developers to interact with system resources like camera and sound sensors from different vendors.At MIH Partner Gathering Event, this working group demonstrated: The API architecture planned by Smart Cabin & In-Vehicle AppsWG in the future will be demonstrated through a number of cabin manufacturers, including the IVI system from Clientron, voice sensing from Cerence, the application marketplace by DRIMAES, navigation from TomTom. The flexibility and context of the Cabin API will be presented by integrating these modules in the future.