The mission of the Autonomy Working Group (AD WG) is to develop autonomous driving (AD) and Advanced Driver Assistance Systems (ADAS) requirements and specifications for the MIH EVKit platforms.
| Start date | 4 Nov. 2021 |
| Charter extension | N/A |
| Chair | Christian John (Tier IV) |
| MIH Contacts | Tony Chen (MIH) |
| Meeting Schedule | Teleconference: bi-weekly |
The scope of the AD WG is:
Leverage AWF Open AD Kit specifications and reference implementations to define AD technology agnostic.
APIs:
Reference Design: (Depends on participants’ resources)
Other non-normative documents may be created like, use case and requirements documents, implementation reports, and Best Practices documents, to support developers.
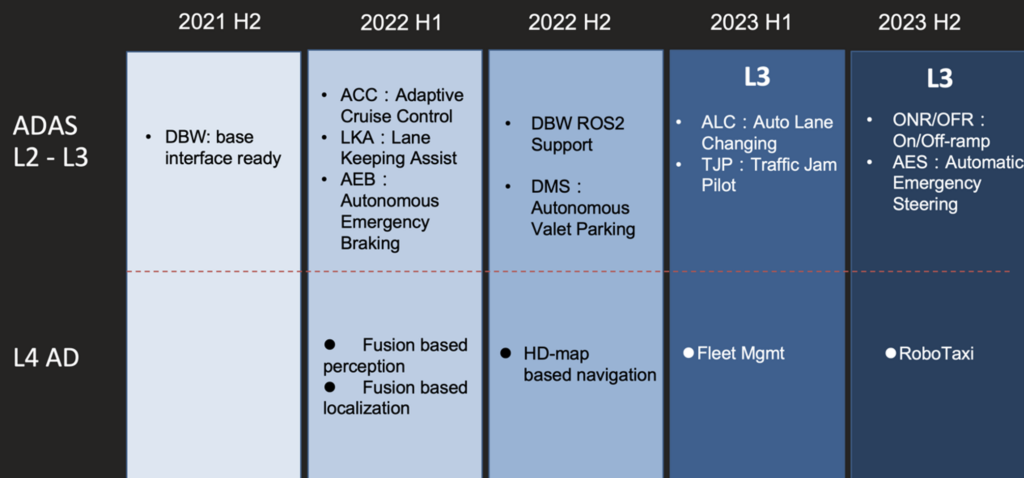
APIs: Half-year release support below functionalities: